

Comunicacions en l’ecosistema de l’electromobilitat
- Dec 4, 2020
- 7 min de lectura
Actualitzat: Jun 30, 2023
RAMÓN GUMARÀ I CIRCONTROL. Director tècnic de R&D Producte
Produir millors vehicles elèctrics i omplir la xarxa viària de carregadors no és garantia perquè la mobilitat elèctrica s’acabi imposant i conquereixi el gran públic. Perquè això passi, cal que tota aquesta infraestructura es vegi acompanyada d’un seguit d’avanços tecnològics que acabin conformant un veritable ecosistema que contribueixi a què l’experiència de l’“usuari elèctric” sigui el màxim d’atractiva i satisfactòria.

Aquest ecosistema consta de diversos elements, d’entre els quals, els vehicles i la infraestructura de recàrrega en són la cara més visible. La legislació favorable, l’estandardització i garantir la interoperabilitat també són factors imprescindibles per un desplegament ordenat i fiable. Però per sobre de tots aquests hi ha l’element clau: l’usuari final i la seva interacció amb cada una de les peces d’aquest ecosistema. I és que per més carregadors que tingui la xarxa viària, de res serviran si aquests no s’ofereixen d’una forma entenedora als usuaris i es garanteix que aquests podran carregar amb facilitat a qualsevol punt de càrrega públic.
En aquests primers anys de vida de l’electromobilitat el parc de carregadors s’ha anat desplegant a través de diferents iniciatives públiques i privades que han acabat conformant petites xarxes de recàrrega independents. Això dificulta el dia a dia de l’usuari degut als diferents mètodes d’identificació, localització, tarifació i cobrament. Per fer front a aquesta necessitat, diferents empreses ja estan oferint serveis auxiliars en aquest sector incipient i es presenten davant l’usuari com l’amalgamador d’una infraestructura elèctrica que ha tingut un naixement heterogeni. Aquestes empreses són l’embrió del que s’anomenen les Empreses de Prestació de Serveis d’Electromobilitat (eMSP, eMobility Service Provider): la porta d’entrada dels usuaris a tota la xarxa de recàrrega.
En un ecosistema de recàrrega madur, l’usuari tindrà un contracte amb una eMSP que, a part de definir-li unes tarifes de recàrrega i oferir-li serveis de valor afegit, serà qui li obrirà les portes a poder carregar a qualsevol carregador públic del planeta: només caldrà connectar el vehicle, identificar-s’hi i la recàrrega es realitzarà sota les condicions acordades amb l’eMSP.
Tot i que ara sembli una quimera, aquest model és una rèplica al de la telefonia mòbil: tot usuari disposa d’un terminal [≡vehicle] i un contracte amb un proveïdor de telefonia [≡eMSP] on s’hi estableixen els costos [≡€/kWh], límits d’ús [≡kWh/mes], penalitzacions... Aquest usuari es pot desplaçar per qualsevol punt de la geografia [≡roaming] que, mentrestant, el telèfon es connecta a diferents estacions base [≡carregadors] de diferents operadors [≡CPO]. Amb tot, el cercle es tanca en el moment que les factures sempre arriben a l’usuari pel mateix canal i sota els preus i condicions establertes en el contracte amb el seu proveïdor de telefonia.
Les comunicacions dels vehicles als proveïdors de serveis de mobilitat
Per assolir aquest estat de maduresa calen encara molts passos i tots tenen en comú la necessitat d’un intercanvi massiu d’informació entre els diferents agents de l’ecosistema de recàrrega. Des del moment en que un vehicle es connecta a un carregador fins que es fa el cobrament d’una operació les dades pateixen diferents transformacions i es van modulant de manera que es generen els valors d’interès per a cada etapa. És a dir, mentre que en la comunicació ISO15118 o CHAdeMO entre carregador i vehicle pot ser vital monitoritzar les dades de tensió i corrent de la bateria varis cop per segon, aquest tipus de dades no són en absolut rellevants per una transacció OCPP entre un carregador i l’operador del punt de càrrega, on la informació d’interès estarà totalment focalitzada a la descripció del procés de recàrrega: identificació de l’usuari, autoritzacions, energia transferida, durada, ...
Les interaccions i necessitats d’aquest intercanvi de dades entre els diferents agents es representen en el següent diagrama, on també s’hi mostren els protocols de comunicacions més habituals:
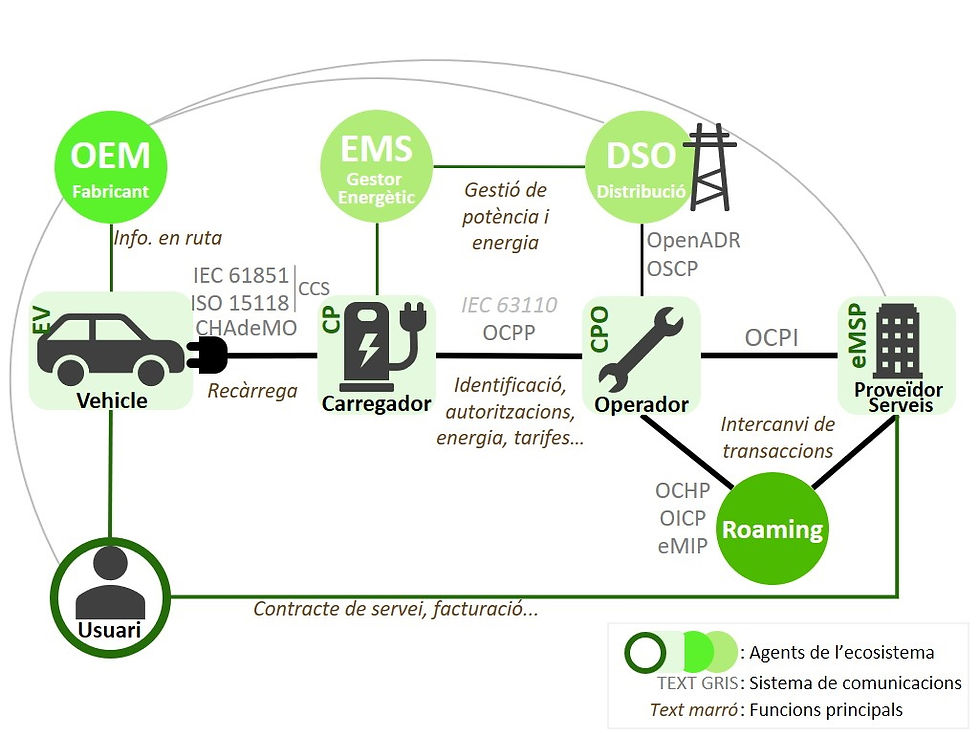
Figura 1: Diagrama de l’ecosistema de la mobilitat elèctrica [Font original: Elaad.nl]
Llegenda i definicions:
EV (Electric Vehicle): vehicle elèctric
CS (Charge System): carregador, sistema de càrrega
CPO (Charge Point Operator): Operador dels punts de càrrega. Empresa que opera i fa el manteniment dels punts de càrrega. Pot ser també el propietari de la infraestructura.
eMSP (eMobility Service Provider): Proveïdor de serveis d’electromobilitat i porta d’entrada de l’usuari a l’ecosistema. Aquesta entitat gestiona tota la informació referent a les transaccions dels usuaris. En moltes ocasions CPO i eMSP poden ser la mateixa entitat però la seva distinció ajuda a explicitar que els usuaris associats a un cert proveïdor poden utilitzar carregadors d’altres companyies (CPOs).
EMS (Energy Management System): Sistema de gestió d’energia. Poden imposar límits tècnics en instal·lacions que puguin tenir certes restriccions.
DSO (Distribution System Operator): Companyia distribuïdora d’electricitat. Poden imposar límits de potència per gestionar la demanda elèctrica en funció de l’estat de xarxa de distribució.
OEM (Original Equipment Manufacturer): Fabricant de vehicles
Roaming: Terme procedent del món de les telecomunicacions que representa l’element d’amalgama que facilita que els usuaris subscrits a un eMSP puguin carregar en qualsevol carregador fora de la seva xarxa utilitzant sempre la mateixa identificació. També se l’anomena Clearing House, que en el món de les finances ‘clearing’ fa referència a l’intercanvi d’informació de transaccions.
Protocols de comunicacions:
IEC 61851
Sistema conductiu de càrrega per vehicles elèctrics I http://www.iec.ch/
ISO 15118
Interfície de comunicació entre el vehicle i la xarxa elèctrica I http://www.iso.org/
IEC 63110
Protocol per a la gestió de vehicles elèctrics i infraestructura de càrrega i descàrrega I http://www.iec.ch/
OCPP
Open Charge Point Protocol I www.openchargealliance.org
OpenADR
Open Automated Demand Response I http://www.openadr.org/
OSCP
Open Smart Charging Protocol I www.openchargealliance.org
OCPI
Open Charge Point Interface I http://en.nklnederland.nl/ https://github.com/ocpi
OCHP
Open Clearing House Protocol I http://www.ochp.eu/
OICP
Open InterCharge Protocol I https://www.hubject.com/
eMIP
eMobility Inter-Operation Protocol I http://www.gireve.com/
Taula 1: Protocols de comunicacions entre els diferents agents de l’ecosistema de la mobilitat elèctrica [Font original: Elaad.nl]
De tot el diagrama de la Figura 1, només la part que afecta a vehicle (EV), carregador (CS) i operador (CPO) és la que, a la pràctica, està àmpliament implementada a dia d’avui i gaudeix ja d’un cert bagatge. Les seves funcions bàsiques ja són una base sòlida que manté i proporciona un servei bàsic a usuaris i operadors, però aquests estan en un procés permanent de revisió i millora per afegir-hi funcionalitats addicionals. En canvi, els intercanvis d’informació de transaccions d’alt nivell entre els diferents CPO, eMSP i plataforma de roaming es basen en protocols de comunicacions que s’estan posant en marxa en entitats que encara tenen un cert caire experimental.
Sí que cal destacar que la comunicació vehicle-carregador és una de les que genera més controvèrsia ja que utilitzar un sistema o un altre també significa incompatibilitat entre connectors. Aquest és un condicionant difícil d’erradicar, però la tendència és que el sistema CCS sigui l’estàndard que s’acabi imposant a nivell global a excepció de la Xina, Japó, l’Índia i alguns països del seu entorn. Si bé els sistemes GB/T o CHAdeMO, propis d’aquestes zones, són sistemes robustos i senzills d’implementar, estan focalitzats en la seguretat del propi procés de recàrrega. En canvi, el CCS, és un sistema molt més complex però que ofereix serveis de comunicació molt més avançats i que de forma nativa obren el camí a aplicacions futures.
CCS, l’estàndard ISO15118 i ‘Plug’n’Charge’
Darrera de les sigles CCS (acrònim de Combined Charge System) hi ha un seguit d’especificacions tècniques que defineixen tots els aspectes d’aquest sistema de càrrega: des de la forma del connector fins a la manera com es fan els tests per garantir la interoperabilitat, passant pel sistema de comunicacions. Aquestes especificacions les recull i publica CharIN (www.charinev.org), una associació formada per les principals empreses del sector de l’electromobilitat i que també vetlla perquè el CCS tingui una presència global.
Un dels passos previstos a mig termini és el desplegament complet del sistema de comunicacions ISO 15118 i una de les seves funcions principals: el ‘Plug’n’Charge’ (Connecta i carrega), que permetrà que l’usuari s’identifiqui i iniciï la recàrrega només en connectar el vehicle al carregador, sense necessitat de targetes. Això suposarà un abans i un després en la manera com s’entén la mobilitat elèctrica. En primer lloc, per l’impacte positiu que aquesta simplificació del procés de càrrega tindrà sobre l’usuari, però el més important és el salt tecnològic que patiran sobretot vehicle i carregador en relació al tractament de la informació i la necessitat de garantir l’autenticitat de les transaccions i protegir tots aquests elements de ciberatacs.
Els vehicles contindran informació sensible: la identitat de l’usuari i el contracte que aquest té amb el seu eMSP. El carregador rebrà aquesta informació encriptada i haurà de validar que l’origen és confiable i autèntic abans de permetre l’inici de la recàrrega. Per establir aquesta relació de confiança cal tota una infraestructura paral·lela, el que es coneix com la Infraestructura de Clau Pública (PKI, Public Key Infrastructure) i una Autoritat de Certificació corresponent que s’encarregui d’autenticar totes les claus i certificats digitals del sistema de mobilitat elèctrica. A més, els carregadors passen a tenir altres funcions, com ara la capacitat d’instal·lar nous certificats i contractes en cas que els que tingui instal·lats el vehicle caduquin o l’usuari hagi canviat de companyia de serveis.
La lletra petita
Conformar una infraestructura de recàrrega unificada a través de les comunicacions i l’intercanvi d’informació oferirà una llibertat de moviments a l’“usuari elèctric” que actualment no té. Però aquesta llibertat que es guanya per un costat, un també pot tenir la sensació d’estar-la perdent per un altre: en algun moment tindrem un contracte amb una empresa de serveis que ens facturarà tota l’energia elèctrica que consumim per desplaçar-nos i sabrà el lloc i l’hora en què es fan les recàrregues, el vehicle utilitzat, el mitjà de pagament...
Facturar l’energia utilitzada en el transport és tenir el ‘control’ sobre un consum que en molts casos és molt superior al consum elèctric d’una llar. Per tant, no seria d’estranyar que aquest atractiu econòmic sigui l’impuls que faci que moltes de les suposicions que es fan a hores d’ara acabin sent una realitat a curt termini. I qui sap si quan anem a comprar el nostre proper vehicle elèctric, les companyies automobilístiques ja ens donaran els seus tríptics amb les seves tarifes de recàrrega amb noms originals i ens oferiran un carregador domèstic a canvi d’una permanència.
Sistemes de recàrrega
Tots els sistemes de càrrega que existeixen parteixen de l’estàndard internacional IEC 61851 que estableix els requisits mínims en quant a seguretat elèctrica i emissions electromagnètiques. Però d’aquests requeriments elementals n’han acabat sortint un seguit d’implementacions que resulten ser totalment incompatibles entre elles. L’origen i existència de cada una d’elles respon principalment a criteris geopolítics i d'estratègia empresarial, on les més conegudes són les següents:
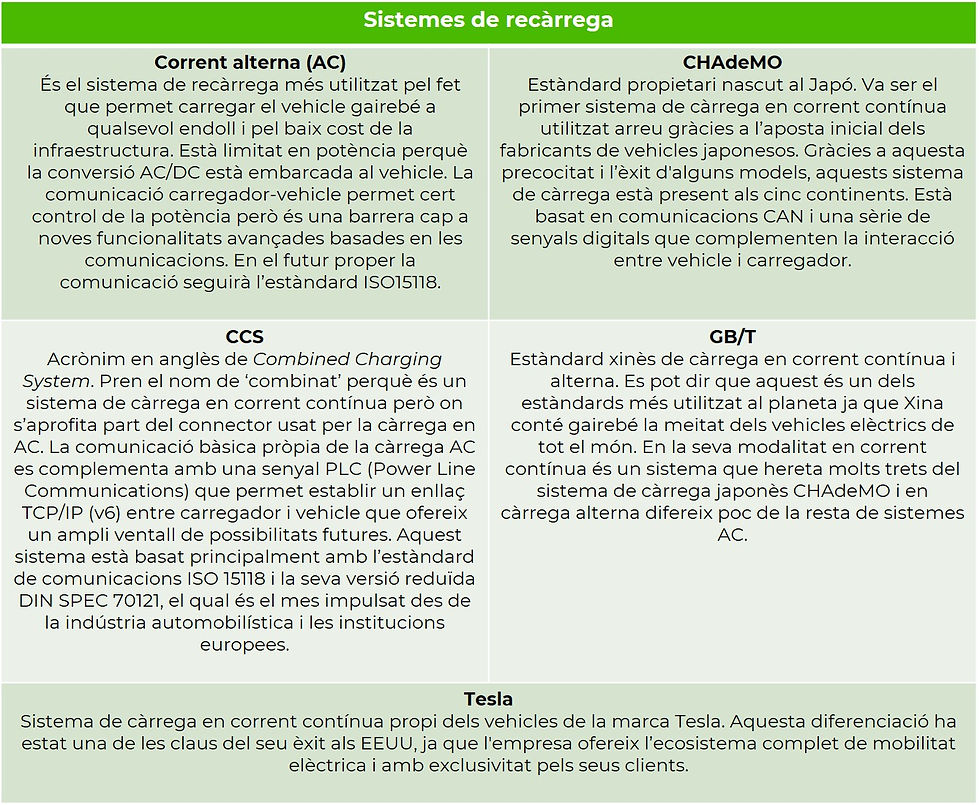
Aquest és l’escenari a principis del 2020 però es preveuen canvis en el futur proper. Un d’ells ja està en marxa, i és que Tesla ja està adoptant el sistema de càrrega CCS pels nous models que es comercialitzen a Europa. Un altre canvi de més impacte en l’entorn asiàtic és l’aparició d'un nou sistema anomenat ChaoJi que neix de la unió dels estàndards xinès (GB/T) i japonès (CHAdeMO) amb l’objectiu de permetre càrregues de fins a 900kW.



Comentaris